Ce tricycle est articulé en sorte de pouvoir pencher librement comme un deux roues et l’essentiel de son équilibre est assuré comme sur un deux roues, en « jouant de la direction ». Contrairement à ce qu’on peut croire à priori, avoir trois roues n’apporte aucune stabilité à partir du moment où l’engin a la capacité de pencher librement comme un deux roues.
Il existe déjà des multi-roues inclinables qui apportent des solutions sur le problème de l’équilibre.
Les bien connus scooters à trois roues se contentent d’un blocage d’inclinaison qui ne sert qu’à l’arrêt. En roulant, tout est comme sur un deux roues.
Certains mettent des ressorts qui tendent à redresser le véhicule. Cela va à l’encontre des lois de la dynamique et c’est une gêne pour la conduite.
D’autres sont articulés en sorte que pencher fait tourner. Plus on penche, plus on tourne. En roulant c’est rarement adapté parce que quand on tourne court on est à basse vitesse donc on penche peu, et à haute vitesse on penche beaucoup tout en tournant peu la direction. Inclinaison et direction ne peuvent pas être dépendants l’un de l’autre.
Pour finir il y a les solutions « high tech » (1) ou l’équilibre est automatisé, très prometteuses mais pas encore au point : un ordinateur ne remplace pas si facilement le cerveau humain.
Après avoir envisagé quelques unes des solutions citées plus haut, j’ai choisi une option radicalement différente : celle de laisser l’équilibre géré par la direction, en me contentant « d’assister ». C’est à dire en ajoutant d’autres moyens d’agir sur cet équilibre.
LA PREMIÈRE ACTION SUR L’ÉQUILIBRE :
Elle est toute simple : des repose pieds en lien avec chacune des roues avant.

En appuyant tantôt d’un côté, tantôt de l’autre, on penche… tantôt d’un côté, tantôt de l’autre.
Bref, exactement comme si on appuyait les pieds au sol, sauf que ces repose pieds appuient indirectement sur les roues donc ça fonctionne même en roulant.

Damien nous montre à quoi ressemble la position dans laquelle nous avons l’effet magique de contrôler l’équilibre avec les pieds tout en roulant : assez proche du fauteuil comme à la maison. Cette recherche d’ergonomie a mine de rien engendré un casse tête qui a duré des années : il fallait trouver de la place pour les pieds à un endroit habituellement occupé par des accessoires aussi superflus que des bras de suspension ou des barres de direction. Les caser ailleurs a nécessité un agencement improbable source de soucis de solidité et rigidité, soucis aujourd’hui résolus.
L’intérêt de ces appuis d’équilibre ? Avec cet engin, c’est indispensable : il n’est pas possible de mettre les pieds au sol comme vous avez l’habitude de faire.
Mais cela sert bien plus souvent que vous ne l’imaginez.
Besoin d’évoluer à très basse vitesse ? En deux roues il y a une vitesse minimum en dessous de laquelle l’équilibre est précaire. Hop les pieds sur les barres, et l’équilibre est sûr quelle que soit la vitesse, ou plutôt quelle que soit la lenteur. Ultra pratique pour tourner très court, ou pour évoluer au pas entre les piétons.
La marche arrière ? Elle devient possible aussi. Sur un deux roues, il est délicat de gérer l’équilibre en reculant, et cette option n’existe que sur certains side-cars.
Et cela sert aussi avec de la vitesse.
Il faut comprendre qu’en deux roues l’équilibre est maintenu en jouant de la direction, grâce à un levier extrêmement efficace qui s’appelle contrebraquage. C’est un léger coup de guidon qu’on peut qualifier d’art de mettre à profit de la force centrifuge pour se redresser ou, au contraire, pour pencher à l’amorce d’un virage.
Si j’ai l’air de me disperser dans une théorie superflue, c’est parce qu’elle est lourde de conséquences. D’abord la force centrifuge est fonction de la vitesse, et donc voici pourquoi il faut une vitesse minimum et pourquoi un deux roues est très stable avec la vitesse. Ensuite parce que ce geste suppose un écart de trajectoire, en principe infime et imperceptible… quand tout va bien et qu’on a la place. Sur un déséquilibre cet écart de trajectoire peut être sensible, et si on a peu de place pour le faire il peut devenir carrément gênant.
Les appuis de pied viennent en complément de notre action sur la direction. En gérant l’équilibre avec les pieds, il n’y a plus à faire d’écart pour se diriger et la trajectoire peut devenir très précise, sans que ce soit un exercice de funambule. Bien appréciable quand la place manque, par exemple pour raser une bordure ou un obstacle, ou pour se croiser dans un passage étroit.
D’une façon générale, ces barres deviennent un recours chaque fois qu’un déséquilibre est à craindre. Ainsi, cette stabilisation de la trajectoire est d’une utilité décisive quand les conditions se dégradent fortement.
Sur terrain très glissant, comme du gravier ou même de la neige, notre cher contrebraquage a ses limites. La roue avant d’un deux roues assurant l’équilibre, si elle se dérobe l’équilibre n’est plus assuré et c’est plutôt la chute assurée. L’appoint des pieds devient une précieuse sécurisation quand ça glisse.
Et j’ai gardé le meilleur pour la fin : l’aptitude au vent latéral.
Une forte rafale de vent latéral va provoquer un déséquilibre qui va engendrer illico un écart pour son rattrapage. Rajoutez une carrosserie à votre deux roues et vous allez décupler sa sensibilité au vent latéral, donc les écarts que vous allez faire dans les rafales. Une carrosserie sur un deux roues est dangereuse en cas de vent latéral, et c’est la raison pour laquelle il n’y en a pas. Ou s’il y en a une c’est avec des côtés largement ouverts, ce qui nuit gravement à l’efficacité de la protection tout en générant d’inconfortables remous avec la vitesse. Alors quitte à devoir malgré tout s’équiper comme un scaphandrier quand il pleut, le choix le plus fréquent est de renoncer à ces semi-protections pour profiter pleinement du beau temps.
La « carrosserie » de cet engin reste conçue pour minimiser l’emprise au vent latéral, en étant la plus basse possible. Malgré tout, sous un vent violent l’engin doit se conduire avec les pieds en permanence sur les repose pieds (2). Cet appui des pieds permet de contenir instantanément un déséquilibre latéral, ce qui limite considérablement les écarts dans les rafales. Bien sûr quand le vent est très violent et tumultueux la conduite demande une grande vigilance, mais l’engin reste maîtrisable. Ce qui ne serait pas le cas sans ces barres d’équilibre.
Donc cet agencement global associé à cette option d’appoint de conduite avec les pieds permet à cet engin d’être maîtrisable par tous les temps, sur tous les revêtements.
Ainsi il peut acquérir la propriété peu répandue d’être un pendulaire efficacement protégé de la pluie.
Cela dit, si cet engin suscite beaucoup d’enthousiasme et de curiosité même sans en connaître ses recherches sur l’équilibre, il n’en va pas de même lorsqu’il s’agit de le prendre en main. Un peu tout est nouveau au premier contact : la position, les commandes, la façon de le conduire. Il demande un apprentissage qui peut prendre plusieurs dizaines de kilomètres pour être à l’aise. Tant que ce cap n’est pas passé, c’est l’appréhension qui reste le sentiment prédominant.
Nous arrivons donc à :
LA DEUXIÈME ACTION SUR L’ÉQUILIBRE
L’ennemi à vaincre est « la peur de tomber » par fausse manœuvre.
Bien sûr j’aurais préféré rester dans le « low tech ». Cela dit je n’ai pas trouvé comment faire un tel dispositif sans faire appel à l’électronique, d’autant que je la vois faire des prouesses dans des domaines voisins comme le pilotage des drones ou les stabilisateurs de caméra.
Mais rassurez vous, l’option choisie reste dans du matériel très ordinaire, pour ne pas dire basique.
Gérer intégralement l’équilibre est extrêmement compliqué à faire par une motorisation pilotée par de l’électronique, alors que dans leur immense majorité les cerveaux humains y arrivent très bien. Donc encore une fois le principe de base sera simple : laisser le job à la personne aux commandes et se contenter d’accompagner le mouvement pour être toujours prêt à contenir un déséquilibre éventuel.
Mine de rien cette approche est, à ma connaissance, une originalité du projet puisque les études similaires concernent des engins sur lesquels tout l’équilibre est automatisé. Assurer la sécurité d’un équilibre géré par le pilote a pourtant de nombreux avantages : une grande simplification, un moindre besoin de précision dans la gestion, une consommation d’énergie minime, laisser au pilote le plaisir de gérer lui même sa conduite et surtout : c’est un dispositif optionnel, le véhicule reste parfaitement utilisable si l’option ne fonctionne pas.
Pour empêcher la chute, il faut limiter l’amplitude de l’inclinaison, tout en laissant la liberté de s’incliner totalement si le besoin s’en fait sentir. Autrement dit, c’est un casse tête de besoins contradictoires.
Face à ce problème, ce que j’ai cherché à faire peut être imagé par les roulettes stabilisatrices qui jadis permettaient l’apprentissage du vélo avant que ce rôle soit aujourd’hui efficacement confié aux draisiennes (3).
Les roulettes stabilisatrices laissent une petite latitude d’inclinaison, qui permet de « sentir » son équilibre. Ce petit jeu est important : un triporteur, qui ne s’incline pas du tout, ne permet pas l’apprentissage du vélo. Mais les roulettes stabilisatrices deviennent très gênantes en dévers ou en virage, si le besoin de s’incliner se fait sentir.
L’idéal me semblait quelque chose qui ressemblerait à des roulettes stabilisatrices « intelligentes », qui détecteraient s’il y a besoin de s’incliner ou pas et qui s’adapteraient automatiquement à la situation. Bref, ce serait la possibilité de rouler librement sans se préoccuper de la chute, nos roulettes veillant au grain discrètement.
Venons-en à la réalisation.
Sur cet engin il y a deux roues avant. Pas tout à fait par hasard, puisqu’elles sont destinées à jouer le rôle de nos « roulettes stabilisatrices ». Il faut pour cela rajouter un dispositif assez encombrant. Comme c’est déjà bien occupé entre les jambes, l’idéal est de déporter sur l’arrière le loger sous la selle.

Tout ce bloc regroupe les fonctions d’inclinaison et de suspension. Pour le loger ainsi, cette suspension à « double bras poussés » s’est imposée, d’autant que par ailleurs elle est bien adaptée à l’appui des pieds sur les roues.
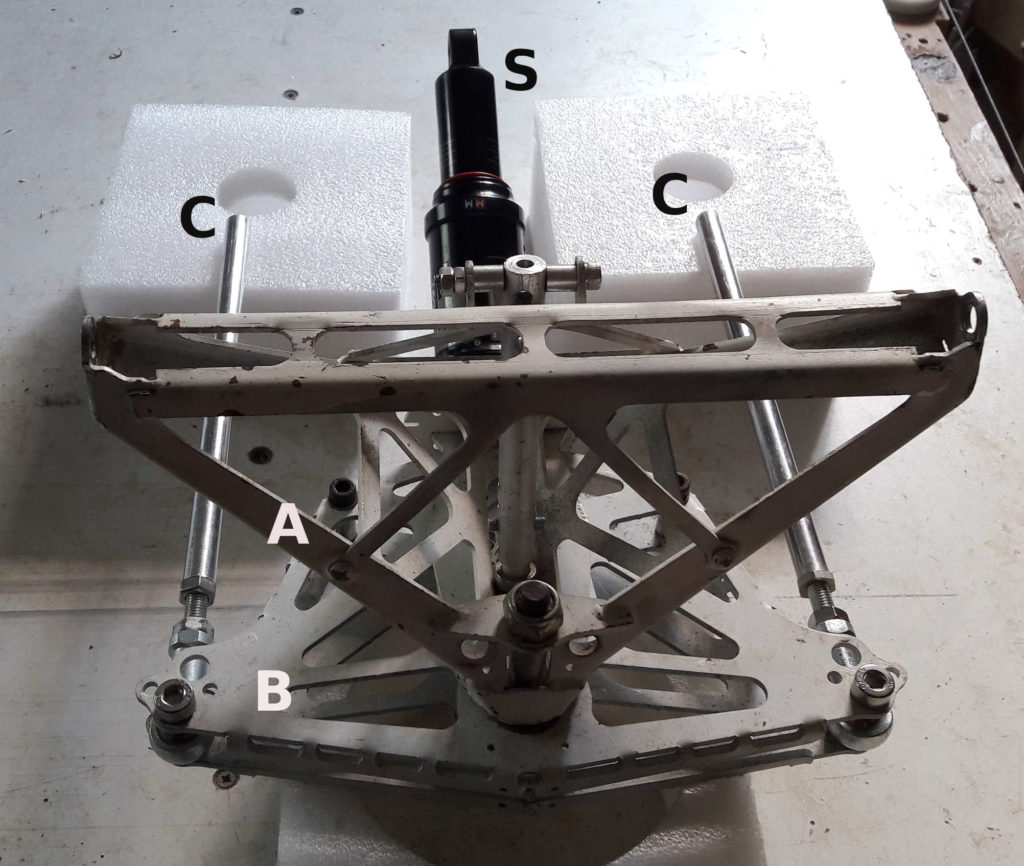
Voici le bloc en version « de base », sans l’option automatisme.
La cage en forme de berlingot (A) reçoit l’amortisseur (S) et balance avec la suspension, c’est le balancier.
La double arche (B) c’est le palonnier. Elle est reliée par les barres (C) aux bras de suspension avant.
Lorsque l’engin s’incline le palonnier pivote.
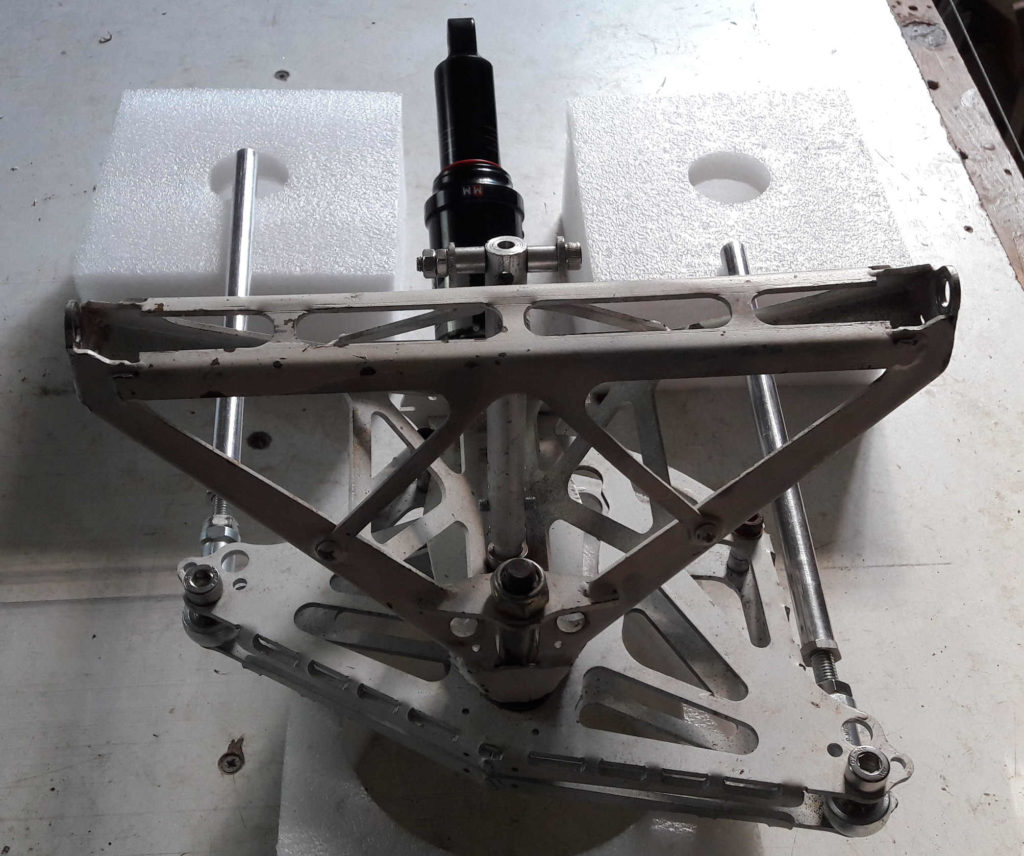
En empêchant ce pivotement, on peut donc bloquer l’inclinaison tout en laissant la suspension active. Le blocage est ferme et fiable, deux critères qui m’ont paru essentiels.
Bloquer basiquement l’inclinaison est surtout pratique à l’arrêt, c’est une façon d’avoir une béquille.
En plus, sur cette version « sans électronique », il y a quand même une position qui donne une amplitude réduite à l’inclinaison, cela permet de ne pas trop pencher pour ne pas tomber. Donc cette position offre une fonction qui est tout à fait comparable à celle des roues stabilisatrices classiques, c’est à dire qu’elle permet l’apprentissage en sécurité, à condition de rouler droit, de tourner au pas, d’éviter les dévers et de prendre le temps de se familiariser. Le tout sur une route dégagée, peu fréquentée, avec le véhicule dépouillé du maximum d’équipements en sorte qu’il soit le plus léger possible.
Donc le dispositif de sécurisation électronique peut être complètement facultatif même pour l’apprentissage. Mais vous avez compris, cet apprentissage est très contraignant et en devient rebutant.
Alors paradoxalement ce dispositif de sécurisation automatique me semble essentiel à mettre au point. La sensation d’insécurité due à l’équilibre est le principal frein à la découverte de l’engin, pouvoir l’enlever permettrait d’élargir le cercle des adeptes potentiels.
Et ça pourrait aller bien au-delà. Beaucoup de personnes ne sont pas sûres de leur équilibre et cela leur ferme l’accès aux deux roues. Des pendulaires sécurisés pourraient même permettre l’apprentissage du deux roues à ces personnes. Mieux encore, des personnes handicapées comme par exemple les paraplégiques ont un cerveau qui leur permettrait parfaitement de gérer leur équilibre mais n’ont pas les capacités motrices pour gérer les déséquilibres. Un tel dispositif pourrait leur ouvrir l’accès aux plaisirs du pendulaire. En voyant toujours plus loin, on peut imaginer des fauteuils roulants pendulaires, ne craignant ni la vitesse ni les dévers tout en restant étroits pour passer partout . Et entre nous, un « deux roues » qui serait protégé des chutes intempestives, ça pourrait bien intéresser aussi les valides aguerris, non ?
Bon, je rêve peut être un peu, mais comme on arrive à la partie complexe du dispositif, j’éprouvais le besoin de vous faire sentir que ce n’est peut être pas si compliqué par rapport à son intérêt potentiel …
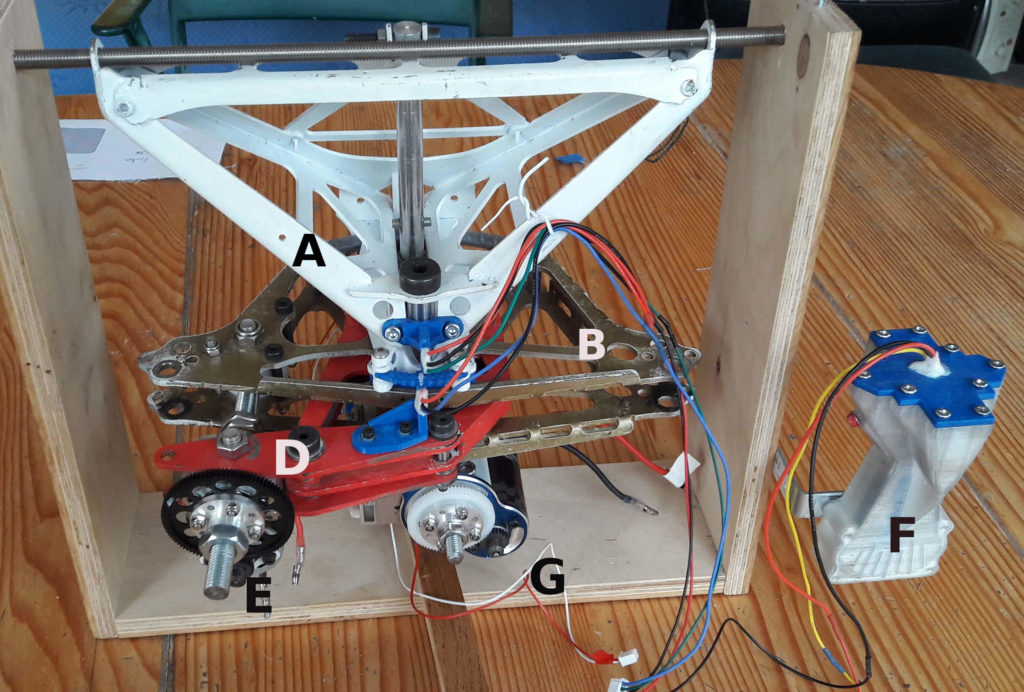
Voici donc notre bloc précédent équipé de ses fioritures.
Le balancier (A) n’a pas changé, le palonnier (B, couleur or) est affublé d’une pièce rouge (D) qui s’appelle la butée mobile. Mobile parce qu’elle se déplace à l’intérieur du palonnier. Pour la déplacer, il y a un petit moteur (E) qui actionne une vis reliée au palonnier. Cette butée qui était intégrée au palonnier dans la version de base peut maintenant se déplacer : elle peut donc s’adapter à la situation, nos « roulettes stabilisatrices » peuvent donc devenir intelligentes et pencher avec nous dans les virages si besoin.
Le moteur (G), c’est pour motoriser l’enclenchement ou la désactivation du système. Ce n’est qu’une option, tout peut fonctionner sans lui.
Déjà, rendre cet ensemble suffisamment solide pour résister aux efforts violents qu’on lui demande n’a pas été une mince affaire. Pourtant le plus compliqué reste à faire : expliquer à cette butée mobile là où elle doit être et l’y conduire.
En gros, il faut savoir si on penche accidentellement ou si on penche parce qu’on est en virage ou en dévers. Insoluble ? Pas du tout. Les capteurs électroniques utilisés dans les drones (gyroscope et accéléromètre) doivent aujourd’hui savoir faire ça, pour ma part j’ai préféré une option à ma portée, c’est à dire quelque chose qui ne me demande pas de calculs complexes.
Cette option, c’est la petite fiole (F). À l’intérieur, il y a une masselotte au bout d’un pendule. Le principe du fil à plomb, en quelque sorte. Cette fiole est fixée au châssis du véhicule. Quand on prend un virage, la fiole penche avec le reste du véhicule et comme par magie le pendule reste au centre de la fiole : le pendule penche aussi, attiré par la force centrifuge (4).
Par contre, si on penche accidentellement, la fiole penche mais le pendule ne penche pas. L’indication est parfaite, en théorie. En pratique il y a des effets parasites et il a fallu plusieurs prototypes pour arriver à avoir une indication acceptable.
Un capteur à effet hall placé sur le pendule de la fiole donne l’écart éventuel à la position centrale, qui est la position d’équilibre. En fonction de cet écart, la position de la butée mobile est ajustée. Le calcul n’est qu’une simple soustraction d’angles : la butée mobile doit compenser l’angle que prend le palonnier quand on penche, déduction faite de l’angle d’écart à la position d’équilibre.
Ce principe est ultra simple, tellement simple que j’ai eu des doutes sur sa validité. Aujourd’hui j’ai pu tester que ça marche dans toutes les conditions, que ce soit en virage ou en dévers, quelque soit le côté. La butée accompagne quand tout va bien et bloque quand on s’écarte de la position d’équilibre.

Le moteur est issu du modélisme, il a à peu près la taille et la puissance d’un moteur de perceuse sans fil. Ce moteur peut être petit parce qu’il n’a pas d’efforts à faire : comme c’est la personne aux commandes qui gère l’équilibre, ce moteur n’a qu’une pièce de métal à déplacer. C’est le gros intérêt de cet « équilibre assisté » par rapport à « l’équilibre intégralement piloté » que l’on trouve sur les quelques tentatives de ce genre de véhicule. Avec un équilibre intégralement piloté, le dispositif doit avoir la capacité à faire pencher ou à relever le véhicule, ce qui suppose avoir de la puissance et aussi malheureusement consommer de l’énergie.
L’autre avantage, c’est qu’il y a du jeu autour de notre butée, ce qui veut dire que la précision de la commande peut être approximative. Tant que notre butée ne vient pas perturber la conduite, elle n’est pas perceptible par la personne qui conduit. Ce n’est qu’en cas d’écart qu’elle devient efficace : elle empêche simplement que le déséquilibre aille trop loin, comme le feraient, encore une fois, des roulettes stabilisatrices.
Question commande de ce moteur, la partie électronique est opérationnelle. Encore une fois je dois remercier et féliciter Gilles Guezou, mon précieux chef électronicien, qui a déjà bien contribué dans le projet de « cumulus de surplus solaires ».
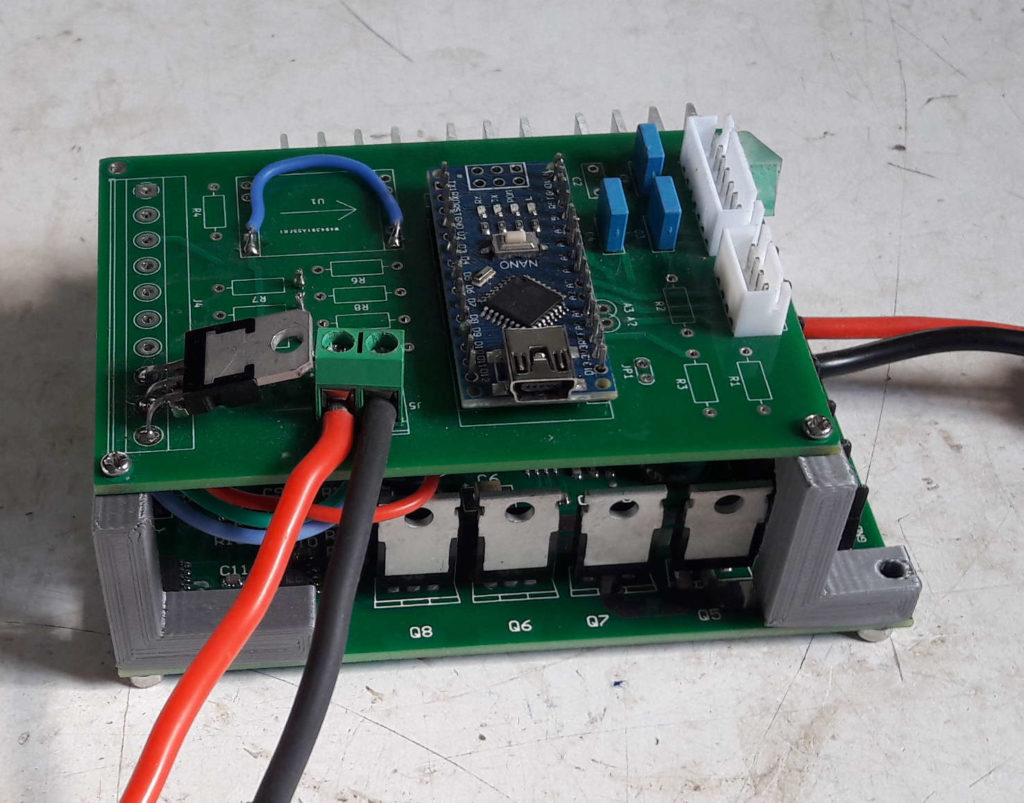
Une puce programmable Arduino nano (en bleu foncé, au centre) donne les consignes à la platine de commande du moteur. Excepté la platine de support de l’Arduino qui est conçue par Gilles, le reste est du matériel générique qui peut s’acheter à bas coût. Cette électronique, tous ces fils et ces engrenages peuvent vous sembler bien complexes. Dites vous qu’aujourd’hui le moindre de vos appareils ménagers comme un mixer ou une machine à café en contient autant, et parfois bien plus. C’est la production de masse qui leur permet d’être à des prix dérisoires en regard de leur complexité. Ce dispositif a la capacité d’être économique même en production artisanale.
À ce stade, tout est là pour fonctionner, mais cela ne fonctionne pas correctement. Ce qui reste à faire est de trouver les bonnes consignes à donner au moteur. L’ordre à lui donner n’est pas aussi simple que « va à droite, va à gauche ». Pas facile de suivre un objet qui change tout le temps de sens et de vitesse de déplacement, avec un moteur qui a des effets d’inertie à l’accélération comme au freinage. Cela engendre des « contre-réactions » qui sont très gênantes en conduisant.
La programmation de cette commande moteur s’avère donc hors de mes compétences, et risque de me demander une énergie démesurée pour un résultat aléatoire : je ne suis pas sûr d’arriver à faire un démonstrateur probant.
Ainsi va la vie, dans les coups durs on relativise et on prend du recul.
Déjà cet engin fonctionne très bien ainsi, avec une particularité qui ne court pas les rues alors qu’à priori elle pourrait intéresser bien du monde: c’est un « pendulaire protégé », utilisable qu’il pleuve, qu’il neige, qu’il vente. Il me semble que rien que ça devrait lui permettre d’avoir quelques adeptes motivés pour passer le cap d’un apprentissage finalement beaucoup plus simple et rapide que celui du vélo ou de la voiture.
Ensuite dans ce dispositif électronique j’ai presque le sentiment d’avoir fait ma part du travail.
l’agencement global fonctionne, la partie mécanique est au point, l’électronique est opérationnelle (merci Gilles), les quelques essais ont permis de voir que l’algorithme de calcul était bon.
La partie informatique s’avère complexe pour moi, mais aujourd’hui des personnes savent faire ça sans problème, il existe de nombreux cas similaires de gestion de l’équilibre.
Ce deuxième dispositif apporte une solution pour faire des « deux roues » qui ne peuvent pas tomber. « Deux roues » au sens où le véhicule se conduit exactement comme un deux roues, avec les sensations du deux roues, même si pour le coup il en a trois. Ajouté au premier dispositif, il permettrait de faire des « pendulaires protégés accessibles à tous ». Si d’aventure quelqu’un y voit un intérêt, qu’il sache que ça existe et que c’est libre de droits.
NOTES:
(1) Par exemple le Carver, ou encore le Cixi Vigoz . La gestion électronique de l’équilibre s’avère assez complexe et ces véhicules sont en développement. Nul doute que des progrès viendront. Ces véhicules ont à mon sens beaucoup d’intérêt, malgré les inconvénients de leur complexité ou encore de la consommation d’énergie du système de pilotage de l’équilibre. Sur ces véhicules, la personne qui conduit n’intervient pas sur l’équilibre qui est entièrement automatisé. On peut dire qu’ils sont à équilibre asservi et non pas à équilibre assisté puisque cette deuxième option suppose une action humaine.
(2) Appuyer les pieds sur les bras de suspension, ce n’est pas compatible avec le pédalage. Cette option est donc très peu utilisable dans le cadre légal du « vélo électrique » qui demande d’actionner les pédales pour activer la motorisation au-delà de 6km/h. Ce cadre légal a des contraintes que j’accepte volontiers puisqu’il a la providentielle qualité de me permettre de rouler avec un engin expérimental sans avoir besoin d’homologation. Il est néanmoins peu adapté à mon véhicule et j’espère arriver à une maturité qui me permettra d’accéder à une homologation dans une catégorie plus « routière ». Cela m’interdira les pistes cyclables, dommage mais elles non plus ne sont pas particulièrement adaptées à mon véhicule… C’est le gros dilemme de cette mobilité intermédiaire, à la fois plus grosse qu’un vélo et plus lente qu’une voiture. Tout le monde sait que c’est ce vers quoi il faudrait tendre sauf qu’elle n’a sa place nulle part.
(3) Les petites draisiennes permettent à l’enfant de rester les pieds au sol tout en sentant l’effet du guidon sur l’équilibre. Ils peuvent ainsi accéder plus jeunes et plus en sécurité à la maîtrise de l’équilibre du vélo. La méthode est la même pour apprendre le vélo aux adultes : on leur transforme les vélos en draisiennes en enlevant les pédales. Si je précise tout ça, c’est parce que le principe des barres d’appui permet un effet comparable à celui des draisiennes : garder un contact avec le sol tout en roulant. C’est pourquoi, sans l’avoir testé, je pense que ces barres d’appui devraient même pouvoir permettre de découvrir le vélo à celles et ceux qui n’en ont jamais fait.
(4) J’ai appris plus tard que j’avais réinventé la bille d’avion, une petite bille dans un tube incurvé qui indique au pilote s’il a pris le bon angle dans le virage. C’est utile dans un avion parce qu’il peut être soumis au dérapage. En vélo ou en moto, pas besoin d’un tel accessoire : votre cerveau sent si vous êtes au point d’équilibre et vous vous ajustez inconsciemment. Notre cerveau est capable de prouesses insoupçonnées, dans le domaine de l’équilibre comme dans le domaine de l’apprentissage.